Note--National University of Singapore online course
The online course about Robotics
lecture one
the main point is to introduces the basic aspects of the robotics.
core technology module
A. Mechanics
Familiarized with the fundamentals
- spatial representation, homogeneous transformations(齐次变换), forward and inverse kinematics(正运动学与逆运动学), velocity kinematics(速度运动学), Jacobian(雅可比行列式), static forces(静力)
- dynamics: Newtonian & Lagrangian formulation
B. Dynamics and control
Acquainted to the essentials
- feedback control(反馈控制), non-liner control, force control
C. Planning & Perception
Apply knowledge to topics in planning & perception
- path/ trajectory/ motion planning
- image formation, processing and analysis, visual tracking, vision-based control, image-guided robotics
the whole structure of the course and the knowledge
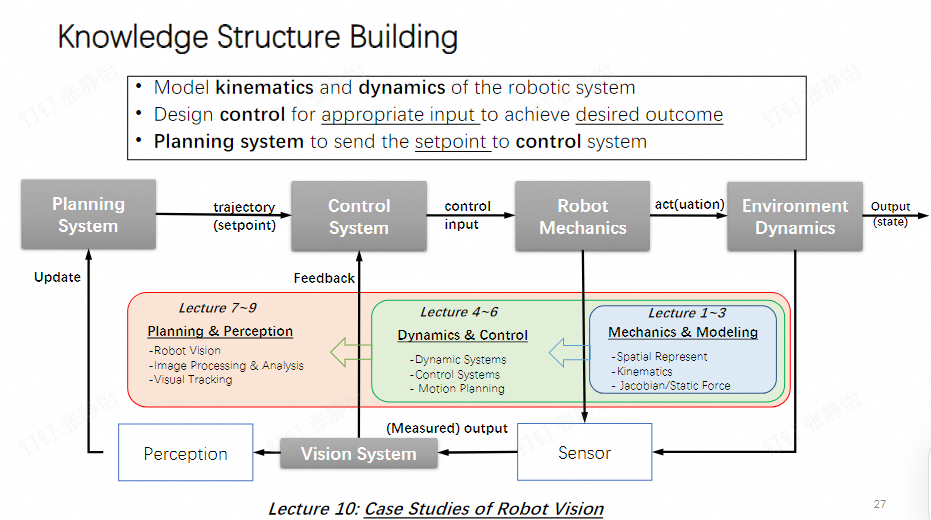 we can have a glimpse of the whole sturcture from this picture
we can have a glimpse of the whole sturcture from this picture
and this is the design process 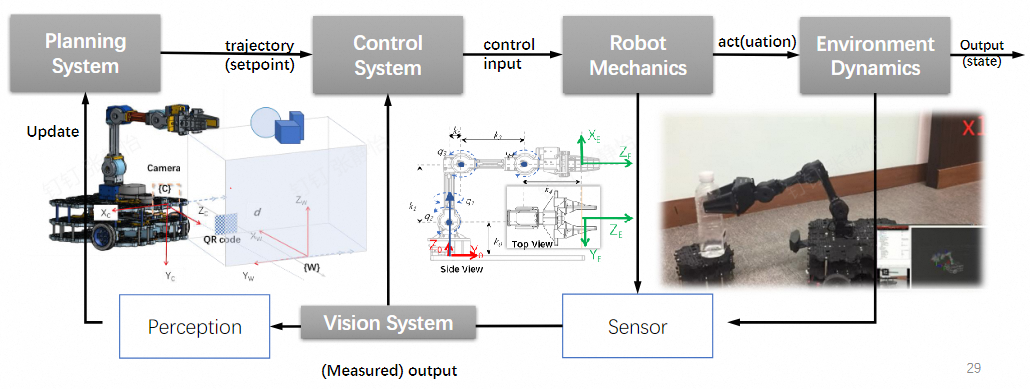
Mechanics
overview
- kinematics(运动学)
- The geometric description of motion, relating joint positions to end-effector pose without considering forces.
- dynamics(动力学)
- The study of forces/torques and their effects on robotic motion.
- planning(规划)
- The process of generating feasible paths or action sequences to achieve a task goal.
- perception(感知)
- Algorithms that interpret sensor data to model the environment and recognize objects.
- control(控制)
- Real-time algorithms that drive actuators to track planned trajectories while compensating for disturbances.
Spatial Representation & Transformation
Introduction to Robotics: Fundamentals
Coordinate Systems
Everyday-Examples of Coordinate Systems?
- On boardgames, on maps …… even the unit number on your address
- Can be 2D, (partial) 3D, Projective……
Homogenous Coordinate System 将3D点/向量升维到4D空间:
点的表示:(x, y, z) → (x, y, z, 1)
方向向量的表示:(x, y, z) → (x, y, z, 0)
关键:末尾的 1 或 0 成为区分点与向量的几何标签。
Reference Frames
- Frame is a coordinate system usually specified in position and orientation relative to other assigned coordinate systems
- Reference frames can be assigned to rigid bodies for the description of object poses and motions
Spatial Description Pose Representation (in ECE 470)
- Position and Orientation w.r.t a frame of reference
- Vector to represent position
- Matrix to represent orientation
for Matrix:
- 矩阵的列向量是单位向量(长度为1)
- 列向量之间相互正交(垂直)
- 满足正交矩阵特性
| 符号 | 含义 |
|---|---|
| A_X_B | {B}的X轴在{A}系中的单位方向向量 |
| A_Y_B | {B}的Y轴在{A}系中的单位方向向量 |
| A_Z_B | {B}的Z轴在{A}系中的单位方向向量 |
✅ 应用示例:
当{B}是机器人末端坐标系,{A}是世界坐标系时:
- A_X_B 表示末端夹爪指向的方向
- A_Z_B 表示末端垂直于夹爪的方向
完整位姿 = 位置 + 方向 → 齐次变换矩阵 for check 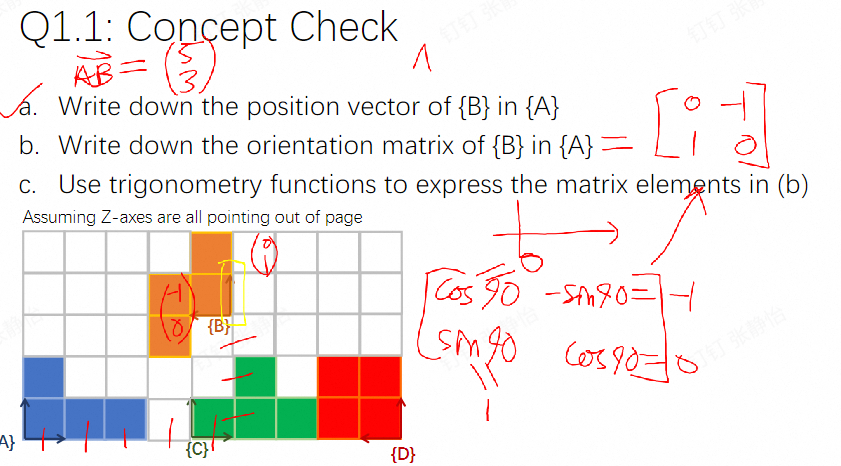
Lecture Two
Topics in Robotics
- Robot Kinematics
- Forward and Inverse Kinematics
- Homogeneous Transformations
- Denavit–Hartenberg Convention
- Velocity Kinematics
Coordinate Transformations & Homogeneous Representations
Spatial Relationships
- Robots operate in multiple coordinate frames
- Must convert between these using rotation + translation
2D Rotation Matrix
Given rotation angle $\theta$:
R(\theta) = \begin{bmatrix}
\cos\theta & -\sin\theta \\
\sin\theta & \cos\theta
\end{bmatrix}
3D Rotation: Sequential Rotations
- Often decomposed into three elemental rotations: roll (x), pitch (y), yaw (z)
- Combined rotation matrix is their product in specified order
Homogeneous Transformation Matrix (HTM)
- Combines rotation and translation into one 4x4 matrix:
T = \begin{bmatrix}
R & p \\
0 & 1
\end{bmatrix}
Where:
- $R$: 3x3 rotation matrix
- $p$: 3x1 position vector
Composition:
T_{AC} = T_{AB} \cdot T_{BC}
Frame Interpretation
- Transformations can move vectors between frames
- Or describe frame poses relative to other frames
Forward Kinematics (FK)
Problem
Given joint angles $\theta_1, \theta_2, …, \theta_n$, find the pose of the end-effector
Approach
- Assign coordinate frames using DH convention
- Build each transformation $T_i$
- Multiply them to obtain total transformation:
T = T_1 \cdot T_2 \cdot ... \cdot T_n
Properties of FK
- Deterministic: one unique pose per joint config
- Depends only on geometry and joint values
Denavit-Hartenberg (DH) Convention
Purpose
Standardize how coordinate frames are attached to links
DH Parameters (per joint i):
| Parameter | Meaning |
|---|---|
| $\theta_i$ | Joint angle (rotation about z) |
| $d_i$ | Offset along z |
| $a_i$ | Link length (along x) |
| $\alpha_i$ | Twist angle (rotation about x) |
DH Matrix Form
T_i = \begin{bmatrix}
\cos\theta_i & -\sin\theta_i\cos\alpha_i & \sin\theta_i\sin\alpha_i & a_i\cos\theta_i \\
\sin\theta_i & \cos\theta_i\cos\alpha_i & -\cos\theta_i\sin\alpha_i & a_i\sin\theta_i \\
0 & \sin\alpha_i & \cos\alpha_i & d_i \\
0 & 0 & 0 & 1
\end{bmatrix}
Example: 2-Link Planar Arm
- Link 1: length $L_1$, angle $\theta_1$
- Link 2: length $L_2$, angle $\theta_2$
Total HTM:
T = T_1(\theta_1) \cdot T_2(\theta_2)
Inverse Kinematics (IK)
Problem
Given end-effector pose $(x, y, \phi)$, find joint variables $\theta_i$
Challenges
- Multiple or infinite solutions
- May be no solution due to reachability limits
- Requires solving nonlinear equations
Example: 2-Link Planar Arm
x = L_1 \cos\theta_1 + L_2 \cos(\theta_1 + \theta_2) \\
y = L_1 \sin\theta_1 + L_2 \sin(\theta_1 + \theta_2)
Use geometric or algebraic techniques to isolate angles
Workspace & Reachability
Definitions
- Workspace: All positions reachable by the end-effector
- Dexterous workspace: Reachable with full orientation
Factors Affecting Workspace
- Link lengths, joint limits, singularities
Practice Problems
Q2.1: What is the workspace of a 2R planar manipulator?
Q2.3: Derive the DH matrix for a revolute joint with $\alpha = 0$, $a = L$, $d = 0$
Q2.5: Solve IK for 2R arm given $x = 1.5$, $y = 1.0$, $L_1 = L_2 = 1.0$
Lecture Three
Velocity Kinematics
What is Velocity Kinematics?
- Describes motion of robot links in terms of joint velocities
- Uses Jacobian matrix to relate joint velocity to end-effector linear/angular velocity
Twist Representation
- A 6D vector $\xi = [v; \omega]$ describes spatial velocity
- $v$: linear velocity
- $\omega$: angular velocity
Jacobian Matrix
\xi = J(q) \cdot \dot{q}
Where:
- $J$: Jacobian matrix (6×n)
- $q$: joint variables
- $\dot{q}$: joint velocities
Jacobian Columns
Each column corresponds to the contribution of one joint:
- Revolute joint:
\omega_i = z_i \\
v_i = z_i \times (p_e - p_i)
- Prismatic joint:
\omega_i = 0 \\
v_i = z_i
Jacobian Applications
Singularities
- Points where Jacobian loses rank
- Robot loses DOF in some direction
Velocity Mapping
- End-effector velocity in Cartesian space
- Useful for trajectory tracking, control
Static Force Mapping
- Transpose Jacobian maps Cartesian forces to joint torques:
\tau = J^T \cdot F
Practice Problems
Q3.1: Compute the Jacobian for a 2-link planar arm
Q3.2: Identify singular configurations for a 3R manipulator
Q3.3: Derive $\tau = J^T F$ for given external wrench
Lecture Four
Robot Dynamics
Newton-Euler Formulation
- Computes link accelerations, velocities, and forces
- Top-down (velocity) and bottom-up (force) recursion
Lagrangian Formulation
- Based on energy: $L = T - V$
- Apply Euler-Lagrange equations:
\frac{d}{dt} \left( \frac{\partial L}{\partial \dot{q}} \right) - \frac{\partial L}{\partial q} = \tau
General Form of Dynamics
M(q) \ddot{q} + C(q, \dot{q}) \dot{q} + g(q) = \tau
Where:
- $M(q)$: inertia matrix
- $C(q, \dot{q})$: Coriolis/centrifugal
- $g(q)$: gravity vector
- $\tau$: joint torques
Control
Position Control
\tau = K_p (q_d - q) + K_d (\dot{q}_d - \dot{q})
- PD control law
- Tracks desired trajectory
Force Control
- Useful in contact-rich tasks (e.g. polishing, assembly)
- Impedance control regulates dynamic interaction
Nonlinear Control
- Feedback linearization
- Adaptive control for unknown parameters
Practice Questions
Q4.1: Derive equations of motion for 2R robot using Lagrange method
Q4.2: Simulate PD control for setpoint tracking
Q4.3: Describe physical meaning of Coriolis term